DISEÑO DE EMBARCACIÓN AUTOPROPULSADA A ESCALA
COMPONENTES ELECTRÓNICOS ADQUIRIDOS
En esta sección se mostrarán los componentes electrónicos adquiridos para la materialización del proyecto. Se enunciarán tanto los actuadores como los sensores que serán utilizados para los diferentes sistemas del bote a escala.
COMPONENTES ELECTRÓNICAS, ACTUADORES, SENSORES Y COMPRAS VARIAS
A continuación se presentan los actuadores que fueron adquiridos para la fabricación de la embarcación:
UNIDAD DE PROPULSIÓN

Características:
- 2075Kv
- TFL SSS 3660 con conector eje de 4mmD
- Diametro del motor brushless: 36mm
- Longitud del motor: 60mm
- Chaqueta metálica de protección
- 550 Gramos(approx) con motor
- Requiere conexión tipo "dog"
- Cantidad adquiridas: 2
- Costo ambas unidades: 2'700.000 (aprox) COSTO ASUMIDO POR ENERGÉTICA 2030
Estas serán las unidades de propulsión del sistema a las que se acoplarán las baterías. Requieren de un control y un módulo RC para su adecuado uso.
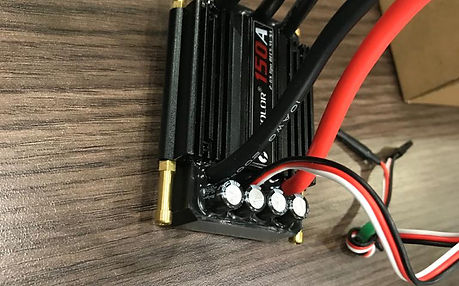
CONTROLADOR MOTOR
Características:
-Controlador de velocidad electrónico ESC sin escobillas
- Resistente al agua, 5,5 V/5 A, BEC para barco teledirigido)
- Cantidad: 2
- Costo: 550.000 COP (Costo asumido por integrantes del equipo)
Encargado de regular la velocidad del motor a través de los comandos RC. Incluye protecciones y entradas y salidas de agua para refrigeración
MANDO A DISTANCIA


Características:
- Control para 8 canales efectivos
- Voltaje operación: 4-10 v
- Dimensiones: 46.25 x 26.6 x 14.2mm (L x W x H)
- Rango: > 1.5 km
- Corriente de operación: 100mA@5V
- Costo: Elemento en calidad de prestamo por parte de la universidad
Actuador del mecanismo de dirección
BATERÍA
Características:
- 8000 mAh
- Capacidad: 8000mAh
- Voltaje: 4S1P / 4 Celdas / 14.8v
- Descarga: 30C Constante / 40C
- Peso: 740g (incluyendo cable, enchufe y estuche)
- Dimensiones: 168x69x32mm
- Tapón de la balanza: JST-XHP
- Cantidad: 1
- Costo: 474.810 COP. Gasto cubierto por proyecto energética 2030
Baterías para el sistema para alimentar ambas unidades de propulsión. Orden de compra montada y a espera de llegada


SERVO MOTOR

Características:
-Peso: 55g
- Dimensión: 40.7 × 19.7 × 42.9mm
- Par de parada: 9.4kg / cm (4.8v); 11kg / cm (6.0v)
- Velocidad: 0.19sec / 60º (4.8v); 0.15seg / 60º (6.0v)
- Voltaje: 4.8 ~ 6.6v
- Tipo de engranaje: Metal
- Cantidad adquiridas: 1
- Costo ambas unidades: 24.000 COP. Unidad adquirida por estudiantes
Actuador del mecanismo de dirección
MICRO-CONTROLADOR
Características:
- Voltaje de funcionamiento 5V
- Alimentación (recomendada)7-12V
- Pines digitales I/O54 (de los cuales 15 dan salida PWM)
- Pines de entrada analógica16
- Corriente DC por I/O Pin40 mA
- Memoria Flash256 KB (ATmega2560) 8 KB usados por el bootloader
SRAM8 KB (ATmega2560)
EEPROM4 KB (ATmega2560)
- Velocidad de reloj16 MHz
- Cantidad: 1
- Costo: Elemento en calidad de prestamo
Microcontrolador necesario para el procesamiento de señales, almacenamiento de variables y alojador del código de adquisición y envío de datos.

SENSOR TEMPERATURA Y HUMEDAD - DHT 11
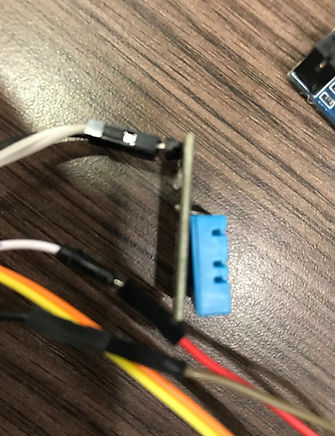
Características:
- Voltaje de alimentación :5 V
- Rango de humedad: 20%~90%RH
- Error en la medida de Humedad: ±5%RH
- Rango de temperatura: 0~60ºC
- Error en la temperatura: ±2 ºC
- Cantidad adquiridas: 1
- Costo ambas unidades: 5.000 COP. Unidad adquirida por estudiantes
Sensor que será utilizado para la medición de la temperatua y humedad en la embarcación
SENSOR CORRIENTE
ACS709 -75 a 75A
Características:
-
Voltaje alimentación: 3 a 5.5 V
-
Voltaje salida: Voltaje análogo proporcional a la corriente centrado en Vcc/2
-
Corriente medida: Entre ±75A
-
Resistencia en la línea de medida: ~1.1 mΩ
-
Incertidumbre: 2 %
-
Ancho de banda: 120 khz
-
Aislamiento eléctrico: 2.1 kV
-
Cantidad: 2
-
Costo: 53.000 COP (Costo asumido por integrantes del equipo)
Con este sensor se medirá la potencia efectiva entregada por la unidad de propulsión. Se implementará en conjunto con el sensor de voltaje.

SENSOR ANGULO E INCLINACIÓN DEL BOTE - IMU-9 V3

Características:
-
Dimensiones: 20 x 13 x 3 mm
-
Voltaje de operación: 2.5V a 5.5V
-
Interfaz I2C
-
Sensor giroscopio: L3GD20H
-
Sensor acelerómetro y magnetómetro: LSM303D
Rango de Sensibilidad:
-
Giroscopio: ± 245, ±500, o ±2000°/s.
-
Acelerómetro: ±2, ±4, ±6, ±8 o ±16 g.
-
Magnetómetro: ± 2, ± 4, ±8, o ± 12 gauss
-
Cantidad adquiridas: 1
-
Costo: 92.000 COP (Elemento adquirido por los integrantes del equipo)
Sensor que permitirá hallar el ángulo de trimado del bote. Incluye giroscopio para determinar angulo de giro en los tres ejes y incluye acelerometro para medición de la variable en los 3 ejes coordenados.
CONEXIÓ INTERNET Y MÓDULO GPS SIM868
Características:
-
Fuente de Alimentación: 3.4V ~ 4.4V
-
Bandas de frecuencia: GSM 850,
-
EGSM 900, DCS 1800,
-
PCS 1900
-
Interfaz SIM: Tarjeta SIM de soporte: 1.8V, 3V
-
Cantidad: 1
-
Costo: 90.000 COP (Costo asumido por integrantes del equipo)
Este módulo permitirá la conexión a internet para el envío de datos a la plataforma dispuesta por el proyecto de telemetría de vehículos del GRID de la Universidad EAFIT. Este módulo incorpora asimismo el módulo GPS para el rastreo de posición y por ende velocidad.

HELICES DIAMETRO 41 mm
2 DERECHAS 2 IZQUIERDAS

Características:
-
Dimensiones: 41mm diámetro exterior y 4mm diametro interior para acople unidad de propulsión
-
2 Hélices izquierdas
-
2 Hélices derechas
-
Acople tipo perro de 4mm
-
Material: Nylon
-
Cantidad adquiridas: 4
-
Costo: 120.000 COP (Elemento adquirido por los integrantes del equipo)
Estas hélices son compatibles con el eje de salida de la unidad de propulsión. Es necesario acoplar una hélice derecha y otra izquierda en la embarcación para contrarrestar fuerzas laterales ocasionadas por el empuje. Se cuenta con reemplazo en caso de falla.
OTROS COMPONENTES IMPORTANTES
Cableado baja potencia - Sensores, Transmisión datos, etc
Antena transmisión de datos
Alimentación Circuito Control
3.7V 3400 mAh



Elevador USB 5V y adaptador USB para alimentación micro controlador
Case Baterías

SIM Kalley para conexión
a internet
Conector de descarga XT90 para
circuito de potencia


MEDICIÓN PROVISIONAL PARA EFECTOS DE ENTREGA #4
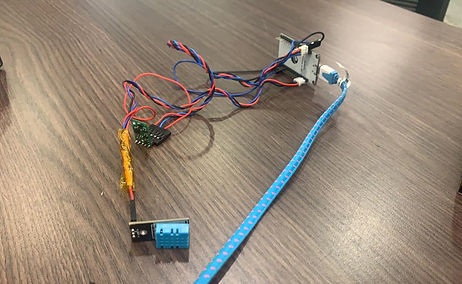
Para medir la efectividad de los sensores adquiridos para el desarollo de la telemetría del bote, el equipo se apoyó del desarrollo en el monitoreo de vehículos eléctricos elaborado por unos estudiantes pertenecientes al grupo de investigación de la Universidad EAFIT, GRID. Para realizar esta tarea, se implementó un circuito utilizando un ESP32 como CPU y un OVMS el cual incorpora una plataforma para previo procesamiento y envío de datos a la plataforma. La comunicación entre la CPU y el OVMS es mediante protocolo WiFi. A continuación se muestra el circuito implementado:
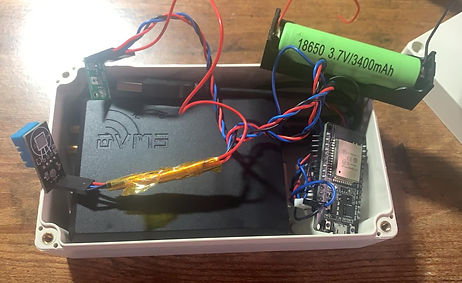
Este circuito provisional, donde se puede observar que se encuentran integrados los sensores de medición de temperatura, ángulo, aceleración, humedad, posición y desplazamiento, permitirá al equipo generar un acercamiento al código de Arduino para integrar los demás sistemas. En la siguiente sección se ilustrará las pruebas realizadas sobre este circuito y la utilidad que presentó esta incorporación de elementos.