

DISEÑO DE EMBARCACIÓN AUTOPROPULSADA A ESCALA
PRUEBAS PRELIMINARES CIRCUITO DE POTENCIA
Una vez el equipo contó con el módulo RC que sería facilitado para el proyecto y mediante el prestamo de una batería, se iniciaron las pruebas del circuito de potencia, el cual constaría de los controladores, motores, servomotor y módulo RC pero el que luego sería integrado con el circuito de control y monitoreo a través de los sensores de corriente y voltaje. Inicialmente, se comenzó con el acople de las fases del motor con el controlador y el acople de los conectores de descarga XT90 con el positivo y negativo de los controladores, como se muestra en la siguiente figura:

Luego, se incorporó la hélice de diametro de 41mm con conexión tipo ¨perro¨al eje de salida de la unidad de propulsión (con su debida lubricación), como se puede observar debajo:

Luego, se acopló tanto la fuente de alimentación como los canales de transmisión de señales del módulo RC, como se puede observar en los siguientes videos:
PRUEBA CIRCUITO POTENCIA
PRUEBA CIRCUITO POTENCIA + SERVO MOTOR
PRUEBAS PRELIMINARES DE TELEMETRÍA
Como se mencionó en la sección del Programa, ya teniendo el programa funcional y mediante el aseguramiento de obtención de variables coherentes, se procedió con la realización de pruebas preliminares sobre la telemetría del dispositivo, es decir, se realizaron pruebas de obtención y envío de datos a la plataforma.
Inicialmente se enviaron datos en el laboratorio para verificar la llegada de datos a la plataforma. La siguiente figura ilustra esta prueba satisfactoria de envío de datos, en este caso el envío de la variable temperatura:

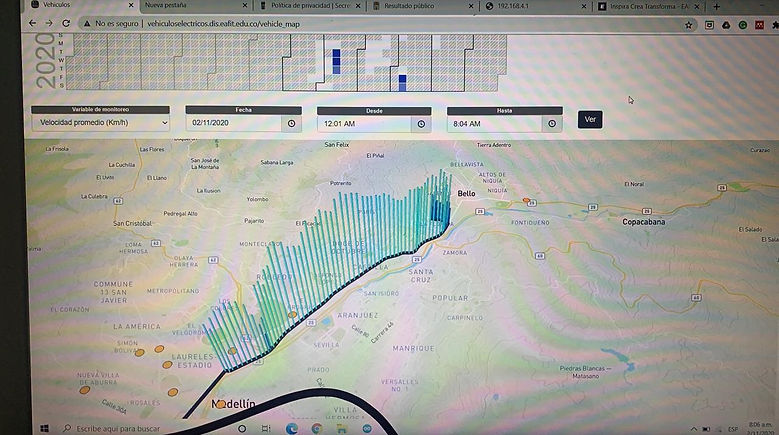
Posteriormente, una vez garantizada la continuidad del programa de Arduino y el correcto envío y recepción de señales, se realizaron pruebas del registro de variables a lo largo de determinada trayectoria. Para llevar a cabo esto, se conectó el dispositivo al computador mediante el desplazamiento al hogar de uno de los integrantes del equipo utilizando un vehículo particular. Como se puede observar en la figura abajo, la plataforma registra satisfactoriamente la velocidad promedio detectada por los dispositivos de medición. Cabe resaltar que esta variable es clave para el proyecto, pues permitirá determinar eficiencias, cumplimiento de velocidad de régimen de planeo y, en general, ayudará a predecir el comportamiento del bote real.
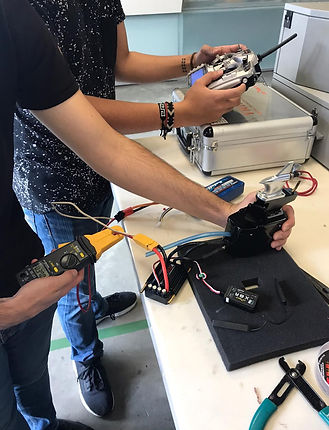
A continuación se ilustra la disposición del kit de telemetría desarollado por el equipo en el vehículo particular.

PRUEBAS SENSADO DE CORRIENTE
Debido a la importancia del sensado de la corriente suministrada a las unidades de propulsión, el equipo decidió hacer pruebas preliminares de este circuito para determinar su confiabilidad. Para este proceso se utilizó una librería ofrecida por Jobojax para el módulo sensor analogo de corriente WCS1800 adquirido en didacticas electrónicas. Este sensor toma un valor de cero durante cada inicio de las pruebas, lo que garantiza que lo que se esté sensando corresponda al cambio experimentado por la unidad de propulsión. Para las pruebas de este circuito se utilizó un voltimetro para contrarrestrar los resultados obtenidos a través del Arduino.

Durante las pruebas en vacio, cuya relevancia es mas bien baja, se detectó que de hecho el circuito y el modulo de corriente estaban arrojando valores muy similares a los detectados por el multímetro (Error del 5% máximo), por lo que el equipo decidió implementar definitivamente este módulo de corriente para la medición de esta variable de gran relevancia para el proyecto. Luego, una vez sabiendo sobre la conformidad del sensor, el equipo procedió a relizar pruebas en el agua para determinar el pico de corriente que experimentarían las unidades de propulsión.
Con estas pruebas fue posible determinar que, a pesar de que el fabricante de las unidades de propulsión anuncia una corriente pico de 70 A, la máxima corriente práctica que podría llegar a experimentar las unidades de propulsión en operación sería de mas o menos 35 A (En el video se puede observar una corriente pico de 32 A). Adicionalmente, cabe resaltar que para poder llegar al factor de escala estipulado en los requerimientos del proyecto para la potencia del bote, las unidades deberían ser limitadas a aproximadamente el 10% de su capacidad, por lo que la corriente pico sería disminuida igualmente.