DISEÑO DE EMBARCACIÓN AUTOPROPULSADA A ESCALA
Estado del arte
Modelos estadísticos desarrollados por equipo ENERGÉTICA 2030
Actualmente, los subsistemas de hidrodinámica y Electro- propulsión han desarrollado el calculo de la resistencia ejercida por el casco y la potencia requerida para propulsar la embarcación respectivamente, esto a través de los métodos estadísticos. La potencia eléctrica a una velocidad determinada, que para el caso de estudio ha sido definida como 55 km/h (15 m/s) , se calculó utilizando los modelos estadísticos propuestos por Wyman [11], Crouch [12], Savistky [13] y Blount-Fox [14]. Para el caso de Savistky y Blount-Fox, la resistencia calculada conduce a la potencia efectiva (PE) a ser entregada por la hélice. Por el contrario, Crouch relaciona las condiciones de funcionamiento con la potencia entregada y Wyman, a su vez, utiliza la potencia instalada (PI). Los resultados de cálculo de resistencia y potencia se evidencian en la grafica mostrada en las figuras 1 y 2 respectivamente.

Figura 1. Cálculo de arrastre para las diferentes embarcaciones evaluadas

Figura 2. Potencia instalada para las diferentes embarcaciones evaluadas
La tabla 1, resume los parámetros principales de diseño el bote seleccionado CAT1IT7 junto con los factores de escala a ser utilizados en el dimensionamiento del bote de pruebas, y la figura 3 muestra la geometría actual del casco.

Tabla 1. Parámetros CAT1IT7

Figura 3. Geometría del bote CAT1IT7
Normativa ITTC
La ITTC The International Towing Tank Conference surge en 1932 al reunir representantes de tanques de prueba para prototipos de embarcaciones de 10 países quienes se reunieron en La Haya, para hablar de manera abierta y confidencial sobre sus propios métodos y también sobre la forma de publicación de los resultados de las pruebas realizadas en sus tanques. La conferencia nombró un comité para elaborar de una manera más definida las conclusiones generales que surgían del evento, comité que posteriormente en 1948 paso a ser un comité permanente de seis miembros regionales para dar continuidad de una Conferencia a otra, este comité luego paso a convertirse en un comité ejecutivo. A medida que aumentaba el tamaño y el número de temas considerados por el ITTC, existía la preocupación de que el ITTC no se convirtiera en una organización difusa que se preocupara libremente por la hidrodinámica de los buques. Además, las organizaciones miembros cuyo negocio principal eran las pruebas de modelos para los clientes estaban preocupadas de que fueran superadas en número por los tanques operados por instituciones educativas y de investigación que no compartían las mismas responsabilidades con los clientes, por esta razón se conformó el el Consejo Asesor que la XIII ITTC en 1972 en respuesta a estas preocupaciones. Ellos establecieron un procedimiento estándar para la realización de pruebas que hoy en día es ampliamente difundido en el mundo y aceptado en el diseño naval de embarcaciones [15] .
La ITTC establece entre otros los procedimientos recomendados para la manufactura de modelos de botes y propulsores[10] y los procesos de prueba y extrapolación para la resistencia[16] y propulsión para embarcaciones[17] . La tabla 2 resume el marco normativo que aplica al desarrollo del proyecto.

Tabla 2. Procedimientos normativos para la elaboración de prototipos y ejecución de pruebas ITTC [10], [16]-[18]
Desarrollo de botes a radio control
Actualmente el campo de los botes a radio control se encuentra explorado con propósitos principalmente comerciales. En oferta es posible encontrar botes de entretenimiento, botes de velocidad, botes detectores de peces [20] (como se puede observar en la patente desarrollada por Brancon Cheek en la figura 4) y hasta desarrollos de trimaranes (bote con triple casco) como solución más efectiva contra el arrastre hidrodinámico de un bote con doble casco (catamarán) [21] como se puede ver en la figura 5. Estas dos patentes mencionadas permiten aseverar que el mundo de la automatización en la náutica ha venido ganando popularidad con los nuevos desarrollos de la electrónica y la automatización, ya que dentro de sus patentes es posible encontrar los planos electrónicos donde incluyen los medios de control como también los actuadores y sensores necesarios para su construcción.

Figura 4. Figura en Patente del Remote-Control Boat with Fish Finder de Brancon Cheex

Figura 5. Figura en Patente del Trimaran Having Outriggers with Propulsors
Sin embargo, el proceso de escalamiento del CAT1IT7 se asemeja más al campo de los drones marítimos, de los cuales se puede diferenciar dos clases: ROV (Remote Operated Vehicle) también conocido como ROUV (Remote Operated Underwater Vehicle) y los USV (Unmanned Surface Vehicle).
ROV: Traducido al español consistiría en un vehículo subacuático operado a distancia, son máquinas operadas a distancias utilizadas principalmente en misiones como reparaciones submarinas, rescates o para la investigación del fondo marino. Las primeras versiones desarrolladas se comunicaban con la operación en terreno a través de cables ya que permiten un mejor rango y mejor precisión, permite conexión a la red eléctrica y se presenta una menor perdida de datos. Por otro lado, una desventaja de esta configuración se relaciona al peso elevado necesario del cable.
Posteriormente, los nuevos desarrollos en los ROV se caracterizan por no contar con cables o “cordones umbilicales” para su funcionamiento y se pueden categorizar por su uso en funciones de observación, habilitados para carga, de trabajo, arrastre remolcado y especializado o prototipo. En el mercado existen varios proyectos ROV, sin embargo, muy pocos de ellos están materializados y operando por su principal desventaja de que, en caso de avería, el proceso de recuperación se vuelve muy complicado. [22]
USV: Esta clase de vehículos consiste en barcos no tripulados que se desplazan por la superficie del agua configurados principalmente para ser operados remotamente o de manera autónoma. Algunas de las principales características de los USV son que tienen relativamente mejor autonomía que los demás tipos de drones, la carga y su tamaño que se pueden adquirir son ilimitados y permiten trabajar en cualquier tipo de agua. Según el trabajo “Proyecto de diseño y selección de materiales para un U.S.V de control medioambiental” [22], este tipo de drones está presenciando un gran desarrollo por parte de proyectos de universidades. Sin embargo, en este documento también se recalca que hay poco desarrollo en la industria de este sector exceptuando algunos proyectos en Europa occidental en los cuales se ha venido utilizando para la recolección de residuos solidos o de hidrocarburos en el agua (Rotterdam, Países Bajos) y para el control y estudio de aguas fluviales (Galicia, España).
Una gran ventaja de este tipo de vehículos en comparación con otros drones que se han venido utilizando, así como en la industria aeronáutica, en la cual su diseño, desarrollo y puesta en operación se encuentra altamente controlado y normativizado, viene dada principalmente por un vacío en cuanto a la legislación y normativa en el campo. Incluso el proyecto en el cual se basa este desarrollo a escala tiene como principal justificación el gran potencial fluvial en Colombia y su baja explotación actualmente. Sin embargo, es importante resaltar que, si se tratará de un USV diseñado para operar en puertos, playas o lugares cercanos a la costa, su reglamentación si estuviera regida por la misma normatividad de una embarcación tripulada, caso que no aplicaría para el Proyecto de Escalamiento del CAT1IT7 debido a que su alcance es meramente experimental y de modelación de fenómenos físicos y no de uso masivo ni comercial.
A continuación, se presentará una clasificación de los USV según su uso para poder visualizar los avances que se han presentado y encontrar puntos relevantes para el proyecto:
-
Militar y seguridad: Debido a su alta posibilidad de implementación para estrategias militares, este es un sector que ha aportado gran desarrollo a los drones marítimos. Se destaca el uso de USV en operaciones de seguridad, labores de vigilancia y apoyo, caza minero y suministro y apoyos para zonas peligrosas. Sin embargo, este es un sector que no es tan abierto al público por obvias razones, por lo que es difícil determinar con exactitud el estado actual tecnológico de desarrollo de USVs.

Figura 6. Ejemplo de un USV protector utilizado en el sector militar
-
Control medioambiental y científico: En este campo se pueden observar “planeadores de olas”, máquinas capaces de aprovechar la energía de las olas para propulsarse sumado con paneles fotovoltaicos que suministran la energía para los diferentes dispositivos que operan. Asimismo, los USV son utilizados para estudiar la hidrografía de los corredores bien sea fluviales o marítimos. Con este tipo de herramientas se pueden desarrollar batimetrías (estudios de profundidad y detección de flora y fauna de las profundidades), exploración, mapeado de fondos marinos y seguimiento de grandes superficies marinas o fluviales. Finalmente, se puede presenciar el uso de los USV en el sector de la agricultura y cuidado y fomentación de la reproducción de las especies marinas [REFERENCIA https://www.saildrone.com/news/usv-use-sound-count-fish-locate-whales].
-
Comercio y transporte: Como lo menciona el artículo de investigación, en este campo se encuentran varios proyectos en etapa de desarrollo para automatizar los procesos y operaciones de buques mercantes y de pasajeros a pesar de su evidente barrera normativa, legislativa y de certificación actual.
Desarrollo de electrónica y automatización en los botes a radio control
Al tratarse de un bote radiocontrolado, surge la evidente necesidad de profundizar sobre la situación actual del campo en cuanto a los dispositivos electrónicos, sensórica y los dispositivos de comunicación entre interfaces que podrán ser de utilidad para el bote. En este apartado se mencionarán los posibles sensores a utilizar como también sus características y tipos. En la sección de “Sensores”, se tabulará la información relevante encontrada.
-
Sensor de viento: También conocido como anemómetro, este sensor permite conocer la velocidad y dirección del viento. Es utilizado en deportes como la vela para medir velocidades pico en momentos determinados. Se encuentran tres tipos principales de anemómetros: de rotación, que consta principalmente de unas cazoletas o hélices conectadas a un eje que permite hacer lectura de RPM y así determinar la velocidad del viento; de compresión, el cual utiliza dos pequeños tubos que permiten medir presión dinámica y estática y con la diferencia de presión, determinar la velocidad del viento; Y el de laser Doppler, el cual es de los más modernos y funciona gracias a un láser.
-
Temperatura: Los sensores de temperatura consisten principalmente en transductores electrónicos que permiten pasar una señal cambio de temperatura en señales electrónicas para luego ser procesados por equipos electrónicos. Existen tres tipos de sensores de temperatura: El termistor, que se basa en el principio de la conductividad para determinarla; el RTD (Resistance Temperature Detector), cuyo principio es el de la energía de los electrones (entre más caliente un material, más dispersos están sus electrones y tendrán menor velocidad, lo que traduce en una mayor resistencia). Los materiales más usados en este tipo de sensores suelen ser cobre, molibdeno, níquel y platino; Y Finalmente, los temporales, que se conocen en la industria también por el nombre de termocuplas y que funcionan por el principio del efecto termoeléctrico.
-
Humedad: Para estudiar las características de un medio, se vuelve relevante la caracterización de la humedad. Existen varios sensores de humedad, como se describe a continuación:
-
Mecánicos: Este tipo de sensor utiliza fibras orgánicas o sintéticas para detectar la humedad aprovechándose de la propiedad de ciertos materiales a expandirse en un ambiente húmedo.
-
Sales higroscópicas: Se utiliza ciertos tipos de sales que tienen gran afinidad con la humedad y la absorben rápida y fácilmente.
-
Conductividad: Utilizan la propiedad de conductividad del agua y, dejando en contacto el líquido con una rejilla de hora, se puede determinar la cantidad de agua por la corriente que se registre.
-
Capacitivos: Amplio uso en la industria y se basan en el cambio de capacidad que sufre un condensador en la presencia de humedad.
-
Infrarrojos: El funcionamiento de este sensor consiste en proyectar una fuente de rayos infrarrojos a través de la muestra a analizar y medir.
-
Resistividad: Funcionan con el principio de resistividad que permite predecir que, entre más concentración de agua, mayor resistencia al paso de energía.
-
Radiación Solar: El sensor encargado de medir la radiación es el piranómetro o solarimetro, el cual permite medir la densidad de flujo de radiación solar en un campo de 180 grados. Los dos tipos de piranómetros son: El térmico, que está formado por una pila termoeléctrica contenida con dos esferas de cristal. El calor originado por la radiación se transmite a la termopila y a través de unos termopares en su interior, se genera una tensión eléctrica; Y el fotovoltaico, el que se basa en el principio fotoeléctrico, en el cual se utiliza un diodo fotosensible el cual es capaz de diferenciar el espectro solar a través de la onda electromagnética.
Aspectos a tener en cuenta para tener un modelo a escala confiable
Para realizar el debido proceso de escalado y pruebas de manera que este pueda representar el comportamiento del modelo, se debe garantizar que se cumplan semejanzas o similitudes en 3 áreas diferentes:
-
Similitud geométrica: La geometría del modelo debe de ser igual a la del prototipo, pero por un factor de escala establecido λ.

Figura 7. Similaridad geométrica
-
Similitud o escala cinemática: Dos fenómenos son cinemáticamente semejantes si cumpliendo con la semejanza geométrica, la velocidad en cualquier punto en el modelo debe ser proporcional (de acuerdo al factor de escala establecido) a la velocidad del punto correspondiente en el prototipo
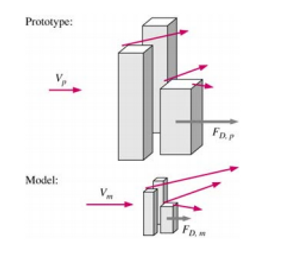
Figura 8. Similitud cinemática
-
Semejanza dinámica: Dos fenómenos son dinámicamente semejantes si con la semejanza cinemática tiene lugar la proporcionalidad y orientación igual de los vectores fuerzas en todos los puntos adecuados de dichos fenómenos. Hablando en rigor, la semejanza dinámica se consigue solo si tiene lugar la semejanza completa de fenómenos cuando todas las magnitudes físicas similares son iguales en todos los puntos correspondientes.
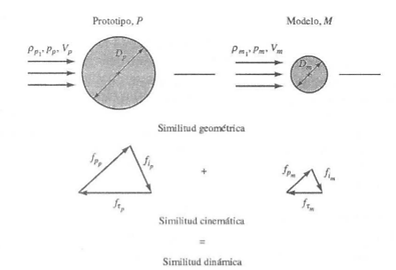
Figura 9. Semejanza dinámica [23]
Las fuerzas que actúan en el campo de flujo son:
-
Fuerzas de presión
-
Fuerzas de inercia
-
Fuerzas de gravedad
-
Fuerzas de viscosidad
Debido a la imposibilidad de recrear exactamente iguales estos fenómenos físicos, es imposible tener una precisión del 100 %, pero gracias a la correlación de ITTC (International Towing Tank Conference) [16] donde se validan estos métodos prácticos, se debe garantizar que las pruebas sean cercanas y consistentes, y así, agregando un pequeño margen de seguridad, se obtendrá un método confiable.
Adquisición de datos en modelos a escala
Hoy en día, los USV (Unmaned Surface Vehicles) son los dispositivos más avanzados en cuanto a recolección de datos en modelos a escala acuáticos. Los USV son embarcaciones a escala que cuentan con diferentes sistemas y pueden realizar tareas de forma automática. Empresas internacionales como Oceanalpha y CEE HydroSystems desarrollan estos dispositivos para tareas como análisis ambiental y seguridad y rescate, en respuesta a la creciente necesidad de información y control de los diferentes cuerpos de agua en el planeta. El mercado enfocado en estos sistemas está en constante crecimiento y seguirá así en el futuro próximo.

Figura 10. Unmaned Surface Vessels (USV) market size, by product, 2013-2024 [23]
Cada embarcación varía según el tipo de tarea para el que está desarrollada, pero en general cada modelo debe estar equipado con ciertos dispositivos y componentes que garantizan su funcionamiento. De acuerdo con el trabajo “Unmanned surface vehicles: An overview of developments and challenges” [24], una embarcación completamente autónoma debe contar con sistemas de navegación, orientación y control para su movimiento adecuado.

Figura 11. General structure of USV guidance, navigation, and control systems. [24]
-
El sistema de guía (Guidance) tiene como deber la constante creación y actualización de comandos de trayectoria, los cuales son enviados al sistema de control y dependen de la información recibida por el sistema de navegación (Navigation), las misiones asignadas, capacidad del vehículo y las condiciones ambientales. Este sistema cuenta con algoritmos de aprendizaje para el cálculo de la trayectoria que seguirá la embarcación
-
El sistema de navegación analiza datos de la posición, orientación, velocidad y aceleración de la embarcación para identificar el estado actual y el estado futuro de la embarcación y su entorno, haciendo uso de los múltiples sensores a bordo.
-
El sistema de control determina las acciones de control apropiadas a realizar en un momento determinado, basándose en información de los sistemas de navegación y guía.
Además de estos sistemas básicos cada embarcación puede contar con sensores y componentes más específicos y avanzados dependiendo del caso, como son las sondas náuticas, sensores lídar y diferentes dispositivos para telemetría. Con estos dispositivos, los USV tienen la capacidad de recolectar grandes cantidades de datos de forma constante, los cuales son enviados a diferentes softwares para ser procesados y analizados, facilitando así los estudios marítimos. Por ejemplo, en el mes de abril del 2019, Oceanalpha realizó un estudio de topografía y batimetría en las aguas que rodean una isla cercana a las costas de China, utilizando un USV equipado con un ecosonda multihaz. La embarcación tomó 7 horas recopilando datos alrededor de la isla, para luego enviarlos a un software de procesamiento. Este fue el resultado:

Figura 12. Survey line record [25]

Figura 13. Water depth rendering map of the triangle island [25]
La ITTC surge de una evidente necesidad del sector comercial, de transporte y gubernamental en el desarrollo de vehículos acuáticos con el fin de reducir el gasto en el desarrollo de nuevas embarcaciones, entender el comportamiento hidrodinámico de los diferentes modelos, estandarizar procesos y métodos, entre otras razones. Debido a esto, el presente proyecto se apoyará de la investigación que ha hecho la entidad en el campo del desarrollo de las embarcaciones, las soluciones propuestas a los diferentes problemas técnicos en el área y para el mejor entendimiento de los métodos experimentales, numéricos y de escalamiento propuestos por esta institución ya que representa el pináculo de la tecnología marítima. Cabe resaltar que la investigación será centrada más en las embarcaciones bi-casco o multicasco ya que la iteración número 7 del proyecto de energética (CAT1IT7) consiste en una nave tipo catamarán con doble casco y el comportamiento hidrodinámico varía significativamente en comparación con aquellas embarcaciones cuya estructura consta de un único casco. Adicionalmente, como se muestran en las iteraciones desarrolladas por el grupo de hidrodinámica del proyecto, los modelos estadísticos que se han desarrollado serán de gran ayuda para la comparación entre modelos y verificación del comportamiento de estos botes en el régimen de planeo, la cual es una situación en la cual la sustentación hidrodinámica supera la sustentación hidrostática, que se traduce en una mejor eficiencia y una reducción en el consumo energético. Estudiar el modelamiento de dicha situación será de vital importancia para poder simular las condiciones reales a las que se espera opere la embarcación.
Como se expresa en el documento de Ghazi S.Bari y KonstantinI.Matveev [26], en las últimas décadas se ha despertado un gran interés en los catamaranes para uso comercial, recreacional y militar. Aún así, la documentación para este tipo de embarcaciones es relativamente limitada. A causa de esto, el presente equipo decidió dirigir la investigación a documentaciones existentes sobre desarrollos de botes a escala a radio control, mejor conocidos como USV. En el proceso, se encontraron 3 tesis de grado españolas [22] [28] [29], que servirían de apoyo para el desarrollo del concepto a manufacturar. El primer documento se enfoca en el proceso de diseño conceptual y entendimiento de los problemas físicos, electrónicos y mecánicos inherentes al diseño de una embarcación de este tipo. Por ello, servirá de apoyo para factores como el cálculo del sistema propulsivo y la geometría del casco. Luego, fue posible encontrar un proyecto final de carrera que se enfocó en el desarrollo del programa en Arduino y la parte de sensórica implementada en un barco a escala autónomo. Por lo tanto, el archivo será de gran ayuda para la parte de Software, Hardware y algoritmos requeridos para el funcionamiento de un vehículo de tal magnitud. Finalmente, en el último documento relevante encontrado, el cual fue realizado por un estudiante de la Universidad Politécnica de Cataluña, fue posible encontrar de igual manera información del proceso de manufactura como también resultados de las pruebas e información de la calibración y reglajes necesarios para la comunicación a radio control. En conclusión, estos documentos presentan buenas bases para el desarrollo de un bote a escala. Sin embargo, el problema a resolver por el presente equipo diverge de estos documentos mencionados en el sentido de que ninguno de estos proyectos buscaba replicar el comportamiento de un bote de dimensiones reales a través de pruebas con botes escalados a radio control, el cual es el principal objetivo del presente estudio. Es decir, para estos estudiantes nunca fueron variables de estudio el régimen de planeo, el comportamiento hidrodinámico, semejanza dimensional, geométrica, entre otros factores que serán clave para el escalamiento del CAT1IT7.
Los modelos de ingeniería son de vital importancia en el campo de la dinámica de fluidos, especialmente en la industria de la aviación y la náutica, ya que producir modelos que permitan simular condiciones reales de operación es una actividad que permite mejorar sustancialmente el desarrollo tanto de aviones como de barcos sin incurrir en gastos elevados. Lograr la semejanza geométrica, dinámica y la escala cinemática será de vital importancia para poder extrapolar los resultados a un bote real que operará en los corredores fluviales de Colombia. De lo contrario, el propósito del proyecto se verá comprometido.
Finalmente, la oferta comercial de los USV utilizados actualmente para exploración marítima superficial, labores de batimetría, exploración del fondo marino, entre otras actividades será una buena fuente para comprender los sistemas de vanguardia utilizados y determinar aquellos sistemas que podrán ser involucrados en el proyecto dentro de lo presupuestado. Esto permitirá desarrollar un bote a escala que permita no únicamente asemejar las condiciones físicas de un bote real si no que también innove en el campo de adquisición y procesamiento de datos como lo sugiere la tendencia global.
Tabulación de Estado del Arte