DISEÑO DE EMBARCACIÓN AUTOPROPULSADA A ESCALA
SELECCIÓN CONCEPTO GANADOR
En esta sección del proceso, será posible observar la metodología utilizada para la selección del concepto ganador con base en las propuestas generadas en la página "Evaluación Conceptual". Para realizar calificación, evaluación y selección, se utilizó una "Matriz de Pugh" para descartar 2 alternativas iniciales y luego una matriz de pesos ponderados para seleccionar el concepto ganador. El punto de partida para cualquier proceso de selección, es determinar las principales variables sobre las que el equipo debe decidir si quiere ejecutar un proyecto que cumpla los requerimientos del cliente, sea funcional y este dentro de lo "realizable" en el marco estudiantil, legal y comercial en el país. Para el proceso de selección, el equipo tomó las siguientes variables sobre las cuales calificar las alternativas, cuya selección provino de un análisis de los puntajes en el QFD:
-
Potencia: Es fundamental que el bote pueda generar una potencia que permita simular las condiciones reales de operación. En esta variable se ve reflejada la selección del motor y el consumo energético. PUNTAJE QFD: 102
-
Grados de libertad de giro de la hélice: El bote debe ser dinámico y la unidad de propulsión debe tener ambos sentidos de giro (y hasta 3 en el caso de unas propuestas en las cuales la unidad se inclina) para garantizar pruebas correctas. PUNTAJE QFD: 70
-
Densidad energética de las baterías: Otro requerimiento asociado al escalado del bote real. Adicionalmente, entre mayor autonomía entregue la fuente de energía, mayor tiempo de pruebas, lo que es esencial para el proyecto. PUNTAJE QFD: 60
-
Porcentaje de piezas comerciales: Es importante para seleccionar el concepto ganador ya que viene asociado a costo y al reemplazo de piezas en caso de fallas. También esta asociado a tiempo de manufactura, pues si se requiere de importación de piezas, influye directamente en dicha variable. PUNTAJE QFD: 102
-
Rango de conectividad: Viene asociado al protocolo de comunicación entre el bote y el mando a distancia. También asocia la distancia a la cual se puede operar el modelo. PUNTAJE QFD: 141
-
Velocidad de transferencia de datos: En esta variable se pueden sintetizar el modulo controlador, los sensores y el servidor al cual se le enviarán los datos. Es esencial tener una buena velocidad de transferencia para que los datos entregados por el sistema permitan sacar conclusiones "extrapolables". PUNTAJE QFD: 81
-
Tiempo de manufactura: El equipo tiene la restricción asociada al tiempo ya que se cuenta con este recurso limitado, pues se deben entregar el proyecto antes de culminar el semestre académico. Ademas, los integrantes del equipo tiene otras responsabilidades académicas. PUNTAJE QFD: 87
-
Costo total del proyecto. Otro recurso limitado e importante a la hora de tomar decisiones sobre que elementos adquirir. PUNTAJE QFD: 212
-
Tiempo de ensamble: El bote debe poderse ensamblar y desensamblar ya que habrán ocasiones en las que se deberán hacer ajustes. Un menor tiempo de ensamble significa mayor tiempo disponible para ejecutar pruebas y realizar modificaciones pertinentes. PUNTAJE QFD: 69
-
Cantidad de piezas: Otra variable asociada al tiempo de desarrollo, tiempo de ensamble y tiene una relación inversa(aunque no tan visible) con el costo del proyecto, PUNTAJE QFD: 180
Es posible observar que las variables asociadas a las dimensiones del bote no son criterio para evaluar las alternativas a pesar de tener puntuaciones altas en el QFD (Ej: Puntaje Factor de escalamiento, Lambda: 260) Esto es debido a que todas las alternativas vienen con la restricción de geometría para poder emular el comportamiento hidrodinámico del bote real. No son variables "negociables" (son entradas de información para el proyecto): peso, volumen desplazado, longitud de eslora, entre otras. Otra variable con alto puntaje descartada para el proceso de selección fue "Porcentaje de procesos de manufactura necesarios vs. Procesos de manufactura disponibles (%)" ya que no permitía generar un criterio de evaluación entre las alternativas propuestas en la Matriz Morfológica.
MATRIZ PUGH
La matriz de Pugh sirve para evaluar alternativas frente a una referencia, la cual equipo decidió iba a ser la alternativa 2. El equipo descartará dos alternativas mediante este método.

De las cuatro alternativas evaluadas se encuentra que los puntajes de calificación están distribuidos de igual manera en dos pares de conceptos, agrupados como ALT 1 y ALT 4; ALT 2 y ALT 3. Mediante el proceso de evaluación es posible evidenciar que las dos mejores alternativas son la ALT2 y ALT 3 por los siguientes factores:
-
Al utilizar motores brushless el requerimiento de ingeniería asociado a la potencia presenta más rendimiento que los motores DC utilizados en las ALT 1 y ALT 4.
-
La densidad energética de las baterías LiPo permite entregar un mejor rendimiento y asegurar la autonomía y ratios de carga y descarga lo que es esencial en el performance durante las pruebas.
-
Aunque las ALT 1 y ALT 4 presentan menor puntaje en la calificación, son las alternativas que presentan valores positivos para características como el costo y porcentaje de piezas comerciales.
-
La ALT 2 es la alternativa que brinda los mayores beneficios en cuanto a confiabilidad, tiempos de manufactura y cantidad de piezas debido a la incorporación de una unidad comercial que integra el sistema de potencia-transmisión-acople-dirección, pero presenta un riesgo alto en materia de disponibilidad costo y tiempos de adquisición.
-
De acuerdo con la calificación y el análisis realizado por el equipo de diseño se descartan las ALT 1 y ALT 4 y se procede a la toma de decisión entre las ALT 2 y ALT 3.
MATRIZ PESOS PONDERADOS

Mediante esta matriz se procedió a comparar las alternativas resultantes de la evaluación ""Pugh"", es decir, las alternativas 2 y 3. Se utilizaron los mismos criterios de ingeniería ya que el equipo decidió que serían las variables de mayor peso a la hora de tomar la decisión. Estas características fueron tomadas directamente del QFD. Con respecto a este proceso de evaluación, se resalta lo siguiente:
-
La alternativa 3 pasa en el proceso de diseño principalmente por la variable costo. La alternativa 2 consiste en la adquisición de un motor fuera de borda que integra el elemento de propulsión, transmisión y tiene disponible un acople para el sistema de dirección por lo que lo hace una alternativa muy atractiva para el equipo ya que no sería necesario realizar un proceso de diseño del sistema de transmisión, acople de ejes ni de acople de sistema de dirección. Estos aspectos se ven reflejados en las calificaciones bajo el ítem ""Tiempo de manufactura"" y ""Cantidad de piezas"". Sin embargo, este motor integrado tendría un costo aproximado de 130 dólares (se requieren 2) más envío (aproximadamente 100 dólares más si se envía a corto plazo). Esta mala calificación y el contraste entre ambas propuestas, se puede ver también en el ítem ""Porcentaje de piezas comerciales"" que se refiere principalmente a la disponibilidad de las piezas en Colombia. Adicionalmente, esta pieza presenta un riesgo de retardo para la entrega ya que viene de China y no se sabe con certeza cuando sería la fecha de llegada.
-
Por otro lado, la ruta seleccionada para esta alternativa 2 no implementaba el módulo GPS que permitirá hacer cálculos de potencia, posición, velocidad, entre otros, el cual sería utilizado en la alternativa 3 y ahorraría mucho tiempo en el proceso de manufactura y en el diseño de sistema de control (se requerirían menos sensores y menos código).
-
El proceso de selección en esta etapa fue difícil para el equipo debido a la gran ventaja en cierta parte de la alternativa 2. Sin embargo, la búsqueda de información con respecto a la adquisición, desarrollo e implementación de los elementos permite concluir que la alternativa 3 también presentaba varias ventajas en cuanto al módulo de control (Por ejemplo, el uso del módulo GPS). Asimismo, el requerimiento asociado al costo del proyecto juega un rol principal en este tipo de decisiones. Asimismo, se encontró que, para utilizar este tipo de dispositivos, también era necesario comprar controladores adicionales (2x 30 dólares aproximadamente).
ARQUITECTURA FÍSICA
La arquitectura Física es útil para integrar las funciones con los portadores de función ya seleccionados. Ayuda a entender mejor el funcionamiento del sistema y los posibles flujos incidentales entre componentes.

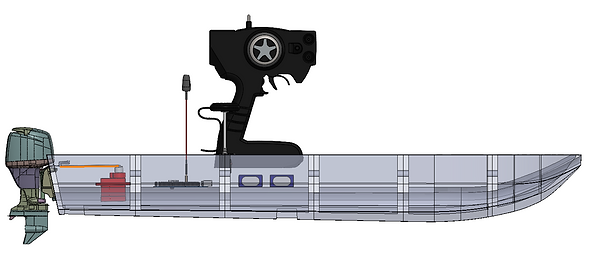
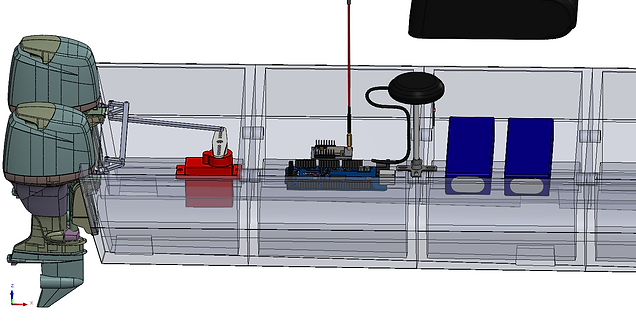
DIAGRAMA DE DISTRIBUCIÓN DE COMPONENTES
Una vez definidos los componentes y su arquitectura física, se procedió a la ubicación de los componentes en la geometría previamente estipulada en el modelo a escala y restringida a la impresión 3D, debido a la necesaria modulación para la impresión que impide espacios completamente continuos en el casco. Para la distribución también se tomaron en cuenta factores como distribución del centro de gravedad (que afecta el angulo de inclinación para entrar en régimen de planeo) y posibles flujos incidentales entre componentes que pueda alterar funcionamientos.

RENDER Y CAD PRELIMINAR DEL CONCEPTO