DISEÑO DE EMBARCACIÓN AUTOPROPULSADA A ESCALA
PROGRAMA DE CONTROL
La estructura general programa consiste en la recolección de datos de las diferentes variables relevantes para el estudio del comportamiento del bote en un periodo de tiempo. Estos datos se almacenan en vectores y después de un periodo de tiempo, se promedian para ser enviados a la plataforma de datos.
Para el código, inicialmente se configuran las diferentes variables que se van a tener en cuenta para la medición del bote (Humedad, longitud y latitud, temperatura, voltaje, corriente, entre otras).

Luego, se configuran los diferentes componentes y se inicia con el ciclo de sensado de variables. Este se realiza en espacios alrededor de 100 milisegundos durante 20 segundos.

Los datos son enviados desde el controlador, en este caso un esp32, hacia el OMVS para después realizar un promedio de cada variable y construir una URL que contendrá, en formato JSON, las variables promediadas recolectadas.

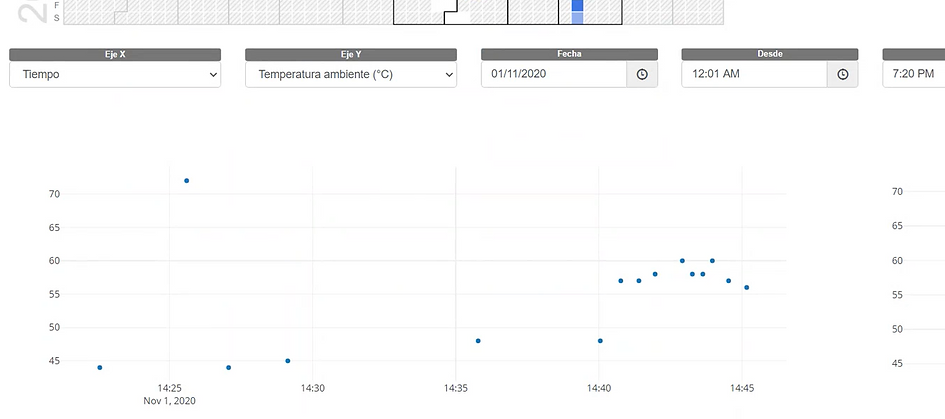
La URL inicia con “http://vehiculoselectricos.dis.eafit.edu.co/addjson?” y luego se agregan las variables, separadas por el carácter “&”. Al final de los 20 segundos, el código hace una petición GET al enlace resultante con los datos obtenidos para enviarlos a la plataforma de vehiculoselectricos.dis.eafit.edu.co, la cual procede a graficar los datos recibidos cada vez que se realiza este proceso.