top of page


DISEÑO DE EMBARCACIÓN AUTOPROPULSADA A ESCALA
DISEÑO BÁSICO
Evaluación Conceptual
Una vez culminada la etapa de diseño conceptual, donde el equipo se contextualizó un poco más sobre el problema a resolver, se procede a la etapa de diseño básico. En esta sección podrás encontrar la etapa de generación conceptual representada en la matriz morfológica, cuyo punto de partida es la estructura funcional y la caja negra, proceso en el cual el equipo entendió la parte técnica del problema y tiene ya la capacidad de proponer portadores de función de los diferentes sistemas que compone al proyecto. Esta etapa del diseño también ilustrará los bocetos realizados de los conceptos, su proceso de filtración (Criterio de Factibilidad) y selección del concepto ganador con sus respectivo diagrama de distribución de componentes,render, entre otros.
Matriz Morfológica
Para comenzar el proceso de generación conceptual, se utilizó la matriz morfológica para explorar ideas de portadores de función para darle solución a las tareas que requiere ejecutar el sistema (especificado en la estructura funcional). Para esto fue necesario investigar un poco más del Estado de Arte de las componentes estipuladas en la tabla de sensores y actuadores preliminares de la etapa de diseño conceptual. El equipo decidió explorar portadores para los siguientes elementos: Motor propulsor, motor sistema de dirección, mecanismo de dirección, transmisión de de la potencia desde el motor hasta la hélice, acople motor-transmisión, sensor de posición, controlador, sensor de corriente y voltaje, baterías, sensor de voltaje, sensor de RPM, mando a control de distancia, sensor de giro y sensor de temperatura. Notese que el equipo no exploró ideas para la configuración del sistema de propulsión ni la geometría del bote debido a que estas variables son definidas desde el alcance del proyecto y, para poder cumplir con los requerimientos del cliente y para que el bote corresponda a un modelo sobre el cual se puedan realizar pruebas y estas puedan ser extrapoladas, no podían ser modificadas. Sin embargo, el propulsor o motor si puede variar siempre y cuando cumpla con el requerimiento de que sean unidades fuera de borda y cumplan con la potencia escalada bajo el factor estipulado en el contexto del proyecto y el cual fue extraído por el equipo del proyecto real.


Evaluación Conceptual
En esta etapa se extraerán 4 alternativas correspondientes a 4 rutas de la matriz morfológica. Posterior a este proceso, se determinará si estas soluciones son factibles y, de ser el caso, se procederá a la evaluación de conceptos y selección de la solución ganadora. Para la selección de las rutas, el equipo se aseguró de incluir las cuatro alternativas del sistema de dirección como también las alternativas de transmisión ya que son aspectos en los que el equipo tiene todavía cierta incertidumbre. En los bocetos iniciales se hará énfasis en estos mecanismos para comprender mejor la solución propuesta en el sistema encargado de llevar la potencia del motor hasta la hélice y el sistema para gobernar y dirigir el bote a escala.
Alternativa 1
Alternativa 1
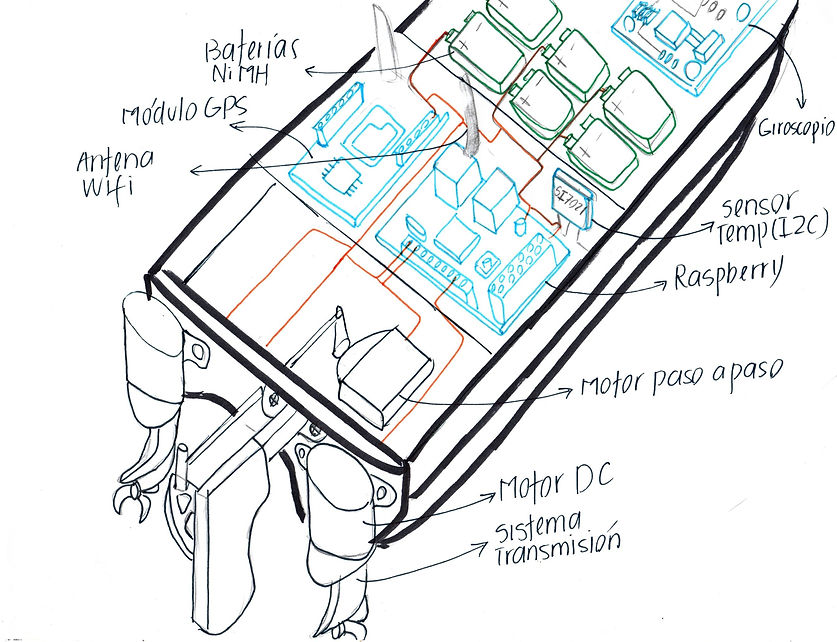
Alternativa 1: Propulsión por Motor DC, Sistema de Dirección Gobernada por motor paso a paso con mecanismo no acoplado a sistema de propulsión (mecanismo cuatro barras + actuador), sistema de Transmisión de Potencia por Ejes Rígidos unidos por engranajes helicoidales (cambio sentido de giro), ensamblado a eje de motor por medio de Acople Flexible Estrella. Sistema de adquisición y envío de datos de posición, velocidad y aceleración a través de Modulo GPS/GSM, Sensor No Invasivo para medir el consumo de corriente del motor. Fuente de Energía por medio de Batería Alcalina NiMH, Sensor de Voltaje y Rotary G Click para toma de datos de RPMs del motor. Módulo de Wifi para mando a distancia. Sensor de tipo Giroscopio para ángulos de giro y aceleraciones en las tres direcciones principales. Uso de sensor de temperatura de tipo Termómetro I2C.


Análisis Preliminar de Factibilidad - Alternativa 1
Para esta alternativa se requiere de un motor DC con sus respectivos acoples para poder realizar el cambio de sentido de rotación del motor (vertical proveniente del motor a horizontal paralelo al bote) y generar el empuje correctamente durante la sumersión en el agua de la hélice. Este concepto es diferente a los demás ya que considera un sistema de dirección totalmente independiente al sistema de propulsión. Por ello, sería necesario fabricar un mecanismo cuatro barras (véase boceto de la alternativa) actuado por el motor paso a paso para poder direccionar el bote.
Es importante notar que esta configuración genera perdidas del empuje generado por los motores, ya que al girar, cierta parte del vector de empuje será perdido y solo actuará la componente para girar. El mecanismo se puede fabricar mediante varillas lisas de bajo calibre ya que no es un sistema sujeto a altas cargas. El timón (sumergido en el agua) podría fabricarse de un material posteriormente definido. Para el sistema de transmisión, sería necesario diseñar el mecanismo de acople entre el eje de salida del motor y el eje de la hélice. Dicho sistema podría ser impreso en 3D por su condición de carga baja pero sería necesario realizar ensayos para comprobar su efectividad. Por otro lado, para esta configuración se requiere del diseño del acople del motor DC en un conjunto albergador integrado con la hélice. La salida del motor y el eje que será conectado al eje de la hélice, se unirá mediante un acople flexible de estrella que se consigue comercialmente. Para el calculo de variables como posición, velocidad, entre otras variables, se utilizará el módulo GPS/GSM que ds de gran utilidad ya que permite la recolección y transmisión de datos a una plataforma (incluye el módulo transmisor). El circuito de control estaría compuesto de un Raspberry. Este se encargaría de procesar datos provenientes de los demás sensores como voltaje, temperatura, entre otros y ayudaría a transmitir la información al PC para visualizar los datos de telemetría.
Tiene como ventaja de que es posible conseguir comercialmente diversos sistemas compatibles. Para almacenar la energía, se podría utilizar baterías NiMH, que poseen ratas de carga/descarga inferiores a las demás baterías pero son significativamente menos costosas. A diferencia de otras propuestas, la idea de esta alternativa es comunicarse via WIFI para gobernar el bote y realizar las pruebas. Adicionalmente, para encontrar el ángulo de trimado, se utilizaría el sensor tipo giroscopio, como el que se puede encontrar en los celulares modernos, el cual es un dato relevante para observar el comportamiento del bote.
Análisis de Madurez de Tecnologías - Alternativa 1
¿Procesos de Manufactura?
¿Parámetros de Contro?
¿Parámetros de seguridad?
¿Modos de Falla?
¿Comprobación Experimental?
- Impresión 3D
- Soldadura por estaño
- Manufactura tarjeta electrónica
- Envío de datos vía Wifi
- Contraste de datos vs cálculos
- Pruebas circuitos electrónicos
- Grado IP para componentes electronicos/carcasas IP65
- Integración de seguridades eléctricas y electrónicas
- Aislamiento circuitos potencia/Control
- Falta de estanqueidad en compartimiento de componentes
- Mala conexión Wifi entre módulo telemetría y el barco
- Dirección ineficiente
- OK. Ensayos podrían ser ejecutados una vez el modelo se fabricará.
Análisis de Alternativa 1 vs. HoQ (QFD)
Las dimensiones del sistema se mantendrán igual debido a que el bote debe ser una escala fiel del bote real. Por tanto, las variables asociadas a peso, longitud, volumen desplazado, ancho, potencia, entre otras no se verán afectadas en el modelo. Sin embargo, en el criterio de potencia, esta propuesta puede verse ligeramente afectada debido al uso de un motor DC, el cual presenta una menor eficiencia frente a los motores brushless utilizados en los otros dos portadores de función disponibles. El motor del sistema de dirección no afecta el requerimiento de maniobrabilidad del usuario. Aún así, el mecanismo presentado aquí puede afectar ligeramente el requerimiento de usuario de que el bote debe ser una replica debido a que en el bote real, el sistema de dirección va acoplado a los propulsores, lo que no sucede en esta propuesta ya que los sistemas son independientes. Las piezas utilizadas en esta propuesta se pueden conseguir fácilmente en Medellín y en Colombia y, el sistema de transmisión se cree que se podría fabricar sin inconvenientes, por lo que esta propuesta presenta ventajas frente a las demás en el tema de costo total del proyecto. Al integrar el módulo GPS y los demás sensores, se garantiza la visualización de datos en tiempo real de operación del bote. De igual manera, los demás portadores de función para sensores, baterías y demás no afectan los requerimientos del cliente. De lo anteriormente mencionado, se puede concluir que esta propuesta es viable frente a la HoQ y continúa en el proceso de selección.
DECISIÓN: CONTINÚA PROCESO (FACTIBLE)
Alternativa 2
Alternativa 2
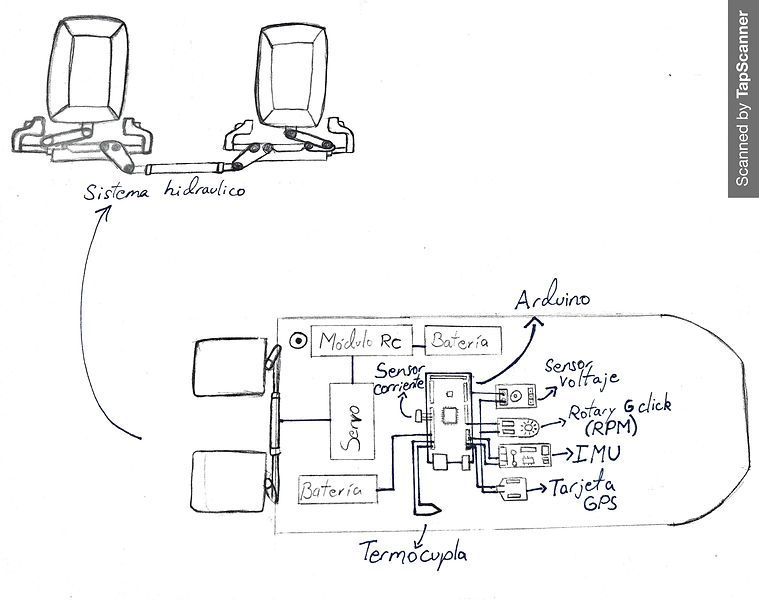
Alternativa 2: Propulsión por Motor RC Fuera de Borda TFL, Sistema de Dirección Gobernada por Servomotor, unido a mecanismo de Dirección por Sistema Hidráulico. Sistema de adquisición y envío de datos de posición, velocidad y aceleración a través de Tarjeta GPS L70 Bee, Sensor de Corriente Efecto Hall para medir el consumo de corriente del motor. Fuente de Energía por medio de Batería de Lítio/Polimero, Sensor de Voltaje y Rotary G Click para toma de datos de RPMs del motor. Modulo de Radio Control para mando a distancia. Sensor de tipo IMU para ángulos de giro y aceleraciones en las tres direcciones principales. Uso de sensor de temperatura de tipo Termocupla. Todos los sensores estarán conectados a un Arduino Mega como Controlador
Análisis Preliminar de Factibilidad - Alternativa 2
Para esta alternativa, se adquieren dos unidades de propulsión fuera de borda TFL, lo cual ahorra la manufactura de la transmisión de empuje, además de tener la potencia necesaria para alcanzar el régimen de planeo. El inconveniente que trae este motor es el elevado costo que tiene. Por el lado del sistema de dirección, se utiliza un sistema hidráulico que empujará los motores a la izquierda o derecha, haciendo pivote sobre si mismos. Este sistema puede estar sobre dimensionado para lo que se requiere en este proyecto, ya que se suelen usar en embarcaciones mas grandes o de mayores velocidades. Los sensores que tendrá esta alternativa son: La tarjeta GPS L70 Bee para adquirir datos de posición y enviarlos a ser procesados al controlador, un Sensor de Corriente Efecto Hall, un Sensor de Voltaje, un Rotary G Click para sensar RPMs y una termocupla para la temperatura. Todos estos sensores estarían conectados al controlador, en este caso un Arduino Mega, para el procesamiento de los datos recibidos y posteriormente el envío a un servidor remoto para su visualización. Se debe analizar la velocidad de envío de datos por parte de la tarjeta de control utilizada, ya que esta velocidad se debe asemejar lo mas que se pueda el tiempo real para así tener datos coherentes con el estado del bote en todo momento. Por otro lado, existen otras opciones para el sensor de posición que podrían proveer mas datos útiles. Por lo general, estos sensores se pueden conseguir fácilmente de forma comercial, lo cual es una gran ventaja. Además de esto, el control del bote se realizará con un módulo de Radio Control, el cual tiene un rango de conexión de hasta 500 metros, también es comercial y además es sencillo de integrar con los actuadores del bote, sin necesidad de conectarse al controlador para poder manejarlos. En términos de tiempo de manufactura y número de piezas, esta alternativa prueba ser bastante adecuada. Sin embargo, el costo puede resultar ser un impedimento.
Análisis de Madurez de Tecnologías - Alternativa 2
¿Procesos de Manufactura?
¿Parámetros de Contro?
¿Parámetros de seguridad?
¿Modos de Falla?
¿Comprobación Experimental?
- Impresión 3D
- Soldadura
- Taladrado
- Modulo de Radio Control
- Procesamiento y envío de datos
- Sensado de variables de velocidad, posición, aceleración
- Grado IP para componentes electronicos/carcasas IP65
- Separación de los sistemas de control y los sistemas de manejo del bote
- Interfaces para manejo de cortos
- Entrada de agua en los componentes electrónicos
- Sensado impreciso por parte del controlador y los sensores
- OK. Ensayos podrían ser ejecutados una vez el modelo se fabricará.
Análisis de Alternativa 2 vs. HoQ (QFD)
Número de componentes: Una de las principales ventajas de esta alternativa con respecto a las demás es que, al usar un sistema de propulsión comercial, las diferentes partes que se usan en la transmisión de propulsión ya están acopladas en una misma pieza. Por esto, el tiempo de manufactura y de mantenimiento se reducen favoreciendo así requerimientos de tiempo de ensamble, tiempo de manufactura, facilidad de manufactura, entre otros.
Rango de conexión: El hecho de usar un modulo de Radio Control le da al bote un mayor rango de conexión, siendo posible manejarlo a mayores distancias lo que sería de beneficio para el equipo a la hora de realizar pruebas. Además, este módulo es mas sencillo de integrar con los diferentes actuadores, por lo que el tiempo de manufactura también se ve reducido.
Costo del bote: Esta alternativa hace uso de un motor RC Fuera de Borda TFL. Este motor, a pesar de tener características mas que óptimas para el bote, tiene un precio mas elevado en comparación a las demás alternativas. Además de esto, el sistema hidráulico para el sistema de dirección también tiene un costo mas alto y su función puede ser cumplida por un sistema diferente de un menor costo. Los criterios de ingeniería asociado a dimensiones no se verá afectado por el uso de las componentes seleccionadas, por lo que el factor de escalamiento, uno de los requerimientos mas significativos para el proyecto, no se verá afectado.
DECISIÓN: CONTINÚA PROCESO (FACTIBLE)
Alterativa 3
Alternativa 3
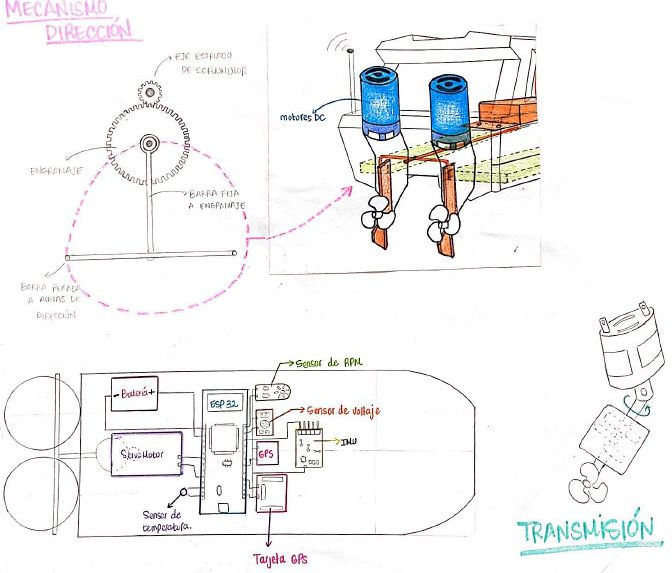
Alternativa 3: Propulsión por Motor Brushless DC, Sistema de Dirección Gobernada por Servomotor con leva pivotada sobre eje-centro y brazos direccionales hacia ambos extremos, unido a mecanismo de Dirección a través de Leva y Barra de Unión configurando el movimiento esclavo para segunda unidad, sistema de Transmisión de Potencia por Eje Flexible (Guaya), ensamblado a eje de motor por medio de Acople Flexible. Sistema de adquisición y envío de datos de posición, velocidad y aceleración a través de Modulo GPS/GSM, Sensor No Invasivo para medir el consumo de corriente del motor. Fuente de Energía por medio de Batería de Litio/Polímero, Sensor de Voltaje y Encoder para toma de datos de RPMs del motor. Modulo de Radio Control para mando a distancia. Sensor de tipo IMU para ángulos de giro y aceleraciones en las tres direcciones principales. Uso de sensor de temperatura de tipo Termómetro digital.

Análisis Preliminar de Factibilidad - Alternativa 3
Esta alternativa reúne 13 portadores de función de los cuales 12 son comerciales y uno requiere de fabricación (Barras de dirección). Adicionalmente para 2 de los componentes comerciales (Eje flexible, Mecanismo barra de unión) se evidencia posibilidad de fabricación de llegar a encontrar dificultad en la consecución de este tipo de piezas, que son de una baja complejidad mecánica y de relativa facilidad de manufactura. El sistema de Adquisidor de datos para esta alternativa se basa en un modulo GPS/GSM que permite la adquisición, comunicación y el envío de datos directamente a un servido Online, para su posterior tratamiento y visualización, esto sin requerir un circuito adicional que genere el enlace o la señal para el envío de datos. Se debe evaluar la velocidad con la que se censa la información y se realiza envío de datos por parte del modulo GSM, garantizando la telemetría de las variables requeridas en un intervalo corto de tiempo tanto para estado transitorio como estacionario del bote. Las Baterías de LiPoly se encuentran con facilidad en el mercado para diferentes rangos de voltaje y capacidad de almacenamiento energético. Se requiere de un cargador para generar el ciclo de recarga una vez se consuma la energía almacenada, esto representa un gasto que es común para todas las alternativas por lo que no influye en el criterio de factibilidad. El sensor utilizado tipo Encoder para las RPMs es de uso común con motores eléctricos y se encuentra diversidad de configuraciones en el mercado, su programación e implementación también se hace bajo relativa facilidad por el uso típico para esta aplicación. El modulo RC permite una comunicación a distancia de hasta 500 metro cuando se trabaja a una frecuencia de 2,4GHz y permiten un uso amplio del espectro representado en frecuencias y canales para el control de servos y motores. Este tipo de modulo de control es de uso común en aeromodelismo lo que garantiza su aplicabilidad para la necesidad y requerimientos planteados. La unidades IMU permiten no solo la adquisición de aceleraciones y giros sino además presión y temperatura, lo cual permitiría una adquisición de datos adicionales que podrían ser de ayuda en la telemetría del bote.
Análisis de Madurez de Tecnologías - Alternativa 3
¿Procesos de Manufactura?
¿Parámetros de Contro?
¿Parámetros de seguridad?
¿Modos de Falla?
¿Comprobación Experimental?
- Mecanizado por arranque de viruta
- Manufactura por adicion de material 3D
- Soldadura por estaño, taladrado
-Ciruitos electronicos analogo/digital
- Sub-ensamble de modulos y sensores
- Modulo Radio Control.
- Grado IP para componentes electronicos/carcasas IP65
- Separación de los sistemas de control y los sistemas de manejo del bote
- Interfaces para manejo de cortos
-Humedad en componentes electronicos
-Corto circuito
-Guaya reventada
-Barra direccion/union bloqueda
-Pega mecanica
- OK. Ensayos podrían ser ejecutados una vez el modelo se fabricará.
Análisis de Alternativa 3 vs. HoQ (QFD)
Escalamiento de las variables de potencia y RPM deben poder ser garantizadas con el motor y el sistema de transmisión utilizado junto con la velocidad de avance para el Régimen de Planeo del bote.
El bote debe mantenerse a flote y la suma del peso de los componentes que conforman la solución no deben superar los 8kg.
La embarcación debe poder albergar todos los componentes, lo que se vuelve vial en esta alternativa gracias al uso del modulo integrado GSM/GPS.
Garantizar hermeticidad IP65, lo que demanda de una carcasa para alojar los circuitos que garantice IP.
La embarcación debe poderse maniobrar, esto se garantiza con los grados de giro y el movimiento progresivo brindados por el servomotor y mecanismo barra/unión.
El bote esta fabricado con piezas fáciles de conseguir en Colombia, se garantiza con que la mayoría de componentes son comerciales a excepción de la guaya de transmisión, se plantea la posibilidad de fabricación.
Se debe posibilitar la telemetria, se garantiza con el uso del modulo GSM/GPS para las variables principales Posición, Velocidad, Aceleración.
El bote es fácil realizarle MTTO, el uso de módulos electrónicos integrados disminuye el numero de conexiones y componentes independientes.
El bote no requiere de mucho tiempo de MTTO, El uso de barras de unión para transmisión de movimiento aumenta en numero de puntos de fricción y posibilidad de pegas mecánicas, por lo que se debe establecer un procedimiento de lubricación antes de operación.
El note no debe ser muy caro, el costo de los motores Brushless DC aumenta el costo de la solución. Costo/Beneficio Favorable (equipo de diseño).
DECISIÓN: CONTINÚA PROCESO (FACTIBLE)
Alterativa 4
Alternativa 4
Alternativa 4. Propulsión por Motor DC, sistema de dirección gobernada por Servomotor, con engranaje y sistema de dos barras encargadas de transmitir el movimiento a las aletas de dirección. Sistema de transmisión de potencia por caja de engranajes, ensamblado al motor por medio de acople rígido. Sistema de adquisición y envío de datos de posición, velocidad y aceleración a través de tarjeta GPS, con sus respectivos componentes, Sensor de precisión para medir la corriente del motor. Fuente de energía por medio de batería de plomo, sensor de voltaje, y rotary g click para medición de RPMs del motor. Se controlará a distancia vía bluetooth. Sensor de tipo IMU para ángulos de giro y aceleraciones en las tres direcciones principales. Uso de sensor de temperatura de tipo Termistor.
Análisis Preliminar de Factibilidad - Alternativa 4
Esta alternativa cuenta con una caja de engranajes para la transmisión. La manufactura de este sistema conlleva de un nivel alto de precisión y en comparación con las otras alternativas un mayor tiempo de ensamble y dificultad, además de una etapa de cálculos adicionales para determinar las relaciones y dimensiones necesarias para cada uno de los engranajes a implementar. Por otro lado, el sistema de dirección también cuenta con un engranaje que va acoplado al eje estriado del servomotor que sería el encargado de transmitir este movimiento al mecanismo de dirección. Este engranaje puede ser más comercial en comparación con los engranajes encargados de la transmisión, lo que podría llegar a facilitar el ensamble de este sistema en específico, además, se necesitan 2 barras metálicas que complementen el sistema y sirvan de unión entre el servomotor, engranaje y aletas de dirección.
Por otra parte, el componente encargado del procesamiento es un ESP32, caracterizado por su poder de procesamiento para tareas complejas, así que puede llegar a ser un componente "sobredimensionado" para las tareas que se tienen definidas. El componente encargado de proporcionar energía eléctrica al sistema, es una batería de plomo, la cual es una de las baterías con menor densidad energética la cual es una de las especificaciones planteadas en el QFD. La tarjeta GPS, nos permite obtener los datos de las 3 variables principales a conocer durante operación: posición, velocidad y aceleración. Para complementar la obtención de datos, se recurrirá al uso de sensores como: el sensor de voltaje, sensor de precisión para medir la corriente del motor, un rotaty g click para conocer las RPMs del motor en un determinado momento, un termistor para llevar el control de temperatura de los componentes críticos y un sensor tipo IMU encargado de medir el ángulo de la embarcación con respeto a la horizontal.
Por último, en esta alternativa se exploró la conexión bluetooth para el comando del bote, método el cuál necesita el diseño e implementación de una interfaz para el usuario.
Análisis de Madurez de Tecnologías - Alternativa 4
¿Procesos de Manufactura?
¿Parámetros de Contro?
¿Parámetros de seguridad?
¿Modos de Falla?
¿Comprobación Experimental?
-Soldadura de estaño
-Impresión 3D
-Mecanizado CNC
-Mecanizado por arranque de viruta
-Velocidad
-Aceleración
-Dirección
-Recolección de datos de sensores analogo/digitales
-Envío y recepción de datos
- Protección de componentes eletrónicos con cajas con IP65
- Protección de elementos electronicos contra cortos circuitos
-Ingreso de agua a componentes electrónicos
-Sobrevoltaje
-Corto circuito
-Desconección constante del sistema de mando bluetooth
-Ingreso de agua por el casco
- OK. Ensayos podrían ser ejecutados una vez el modelo se fabricará.
Análisis de Alternativa 4 vs. HoQ (QFD)
Número de componentes: Al compararse con otras alternativas, esta propuesta cuenta con mayor cantidad de componentes, lo que afecta directamente el tiempo de ensamble, la facilidad y tiempo de mtto.
A diferencia del motor fuera de borda propuesto en la alternativa 2 que tiene integrado el sistema de transmisión y una carcasa de protección del sistema, en esta alternativa se deberá fabricar e integrar el sistema de potencia y la transmisión, además, de manufacturar la carcasa que alojaría estos dos sistemas.
Rango de conexión: al ser controlado por medio de bluetooth se ve restringido el rango de conexión en comparación con el uso de un sistema RC, además se requeriría el diseño de una interfaz para su manejo.
Al tener una batería de plomo, el impacto ambiental es mayor, además de la relación tamaño, densidad energética la hacen una de las opciones menos viables para el objetivo. impactando tanto el volumen ocupado por los componentes y el peso total.
DECISIÓN: CONTINÚA PROCESO (FACTIBLE)
bottom of page